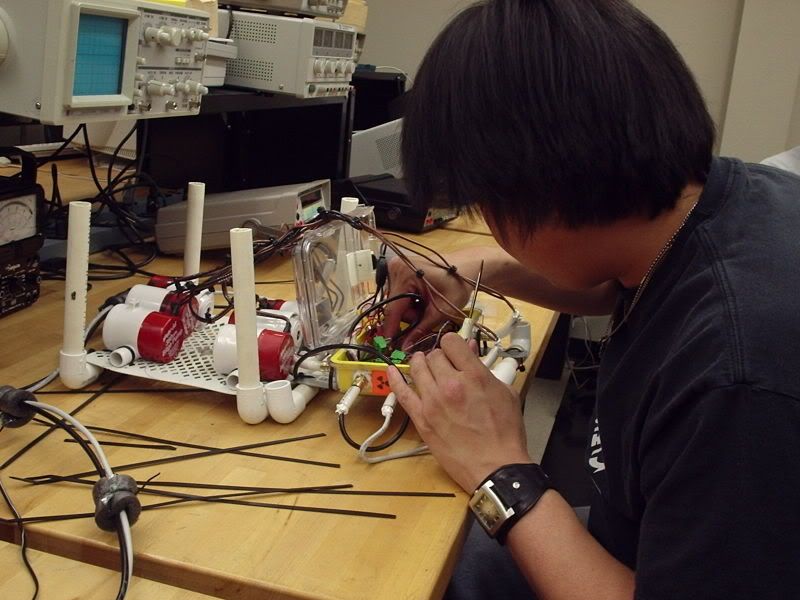
Ronni puts the finishing touches on the board. We had to rewrite the PIC code a few times to get things right.
We also modified the body after a an initial water test made it clear that the sub would not sink and surface. We placed the electronics case horizontally so the sub would trim better in the water. We also set the pumps so that we have two downward facing pumps instead of one up and one down. The sub sort of puddle hops.
Top view of the sub shows the 4 pieces of pipe foam used to help maintain boyancy for the sub.

About to get wet...

The whole team. Final troubleshooting. We had a a bit of a leakage problem, but overall the sub performed well.

The sub is in the water. The original design was in the water the previous week, and required more trim material to keep it stable. The yellow electronics box was originally vertical. With it laying flat, it is a lot more stable, and moves through the water quicker.

Here you can see the sub sliding around the bottom of the pool. We got sucked over to the drain at one point.

Tom is serviceing the power and communications cable, so as not to get us tangled up with the Pool's cleaner hose.

I SWEAR I was not hung over in this shot! ;)
The laptop runs a small program written in VB to send commands to the sub.
The sub can also communicate directly with any serial port. It accepts simple one charactor commands to perform all of its functions, and responds back to verify that it accepted the command.

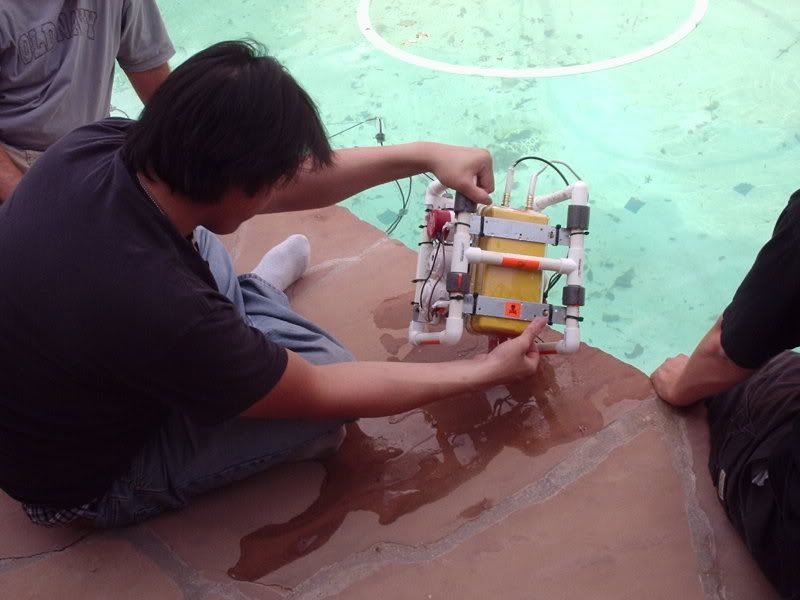
The sub is just below the photo here. We have to tilt the sub in several directions when putting it in the water. The frame of the sub has several holes in it that are used to fill the frame with water, so as not to have an affect on the trim of the sub. Trim is how the sub sits and floats [or sinks] in the water. Trim is in effect, how we control boyancy in the water. We are using passive trim (foam and the floating of the electronics case) as opposed to active trim (flooding tanks).

Once nearly neutrally boyant, the sub becomes very light in the water. It is quite heafty out of water and at first there was much concern about it sinking like a rock, and the thrusters never moving it.
After dumping it in and flooding the frame, however, a little push goes a long way.
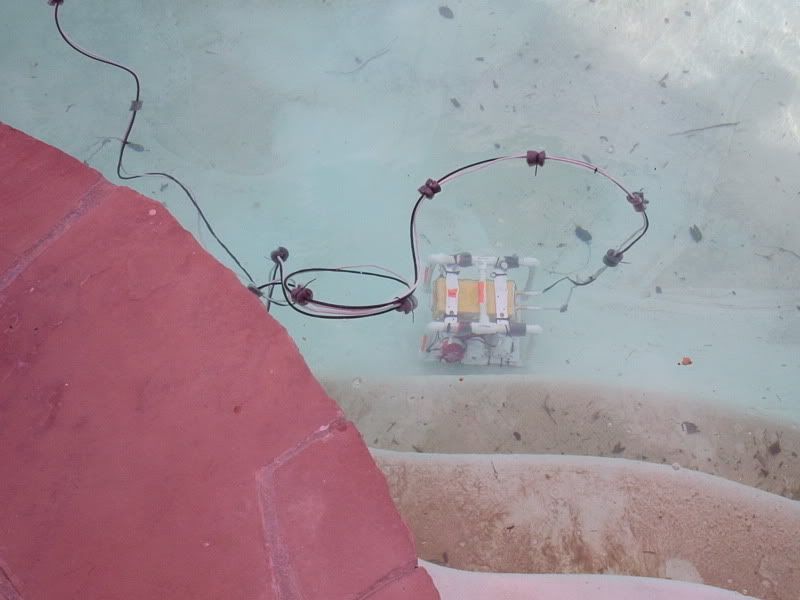
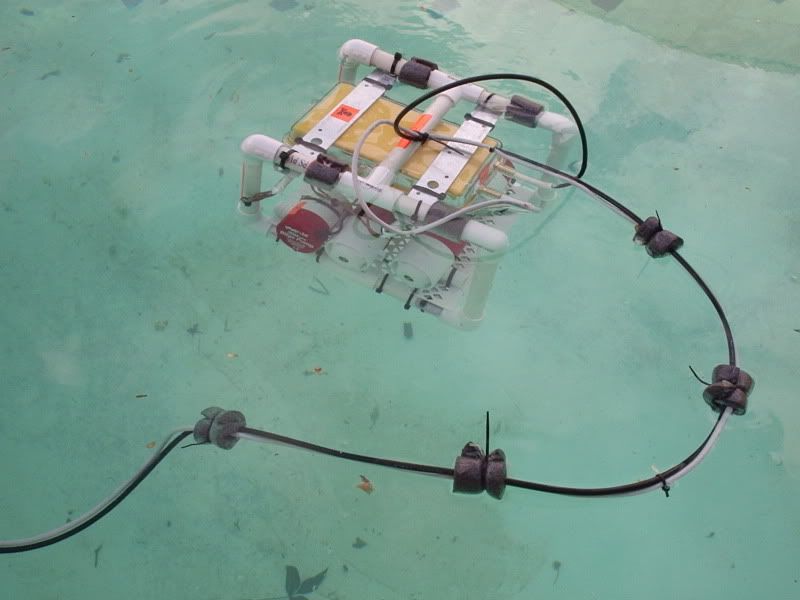
A good shot of the sub and its umbilical. Those little squares are more foam tied to the cables. The reason for that is to keep the cable boyant as well. If it were not boyant, it would fall to the bottom and drag the sub down with it. If it is too boyant, it would float only on the surface and keep the sub from diving when we want it too.

Another sub and cable shot. You can see how the cable snakes around as parts of it float and parts of it sink.
The pools tile triangles were usefull in the video footage to tell that the sub was in fact moving around.

Gratuitous sub and cable shot!
Fish out of water.
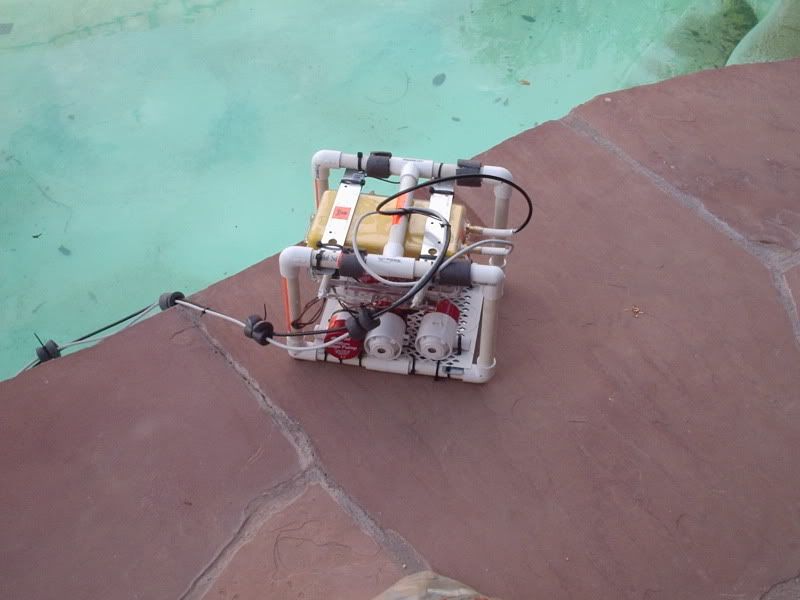
Here the mechanical design revisions are clear. The electronics case is horizontal. The board is mounted to the inside top of the case, where it has some protection from case leaks. The door of the case opens down to drain water when the sub returns to the surface.
The pumps are all mounted laying down on the frame instead of standing. They are much more secure this way and their thrust is put to better use.
Taking another trip around the pool. It is bobing just below the surface. Only the top of the frame and case are above water.
This is close enough to see the three pumps on the left side. The front pump (red cap) is the reverse thrust left side. Two front pumps push the craft in reverse, and two rear pumps push the craft forward. We can 'tank steer' by using one forward pump and the opposite side rear pump.

The other two pumps have their inlets facing out. the center pump is one of the downward facing pumps, which pushes the craft upwards. Rather than having an upwards pump and a downwards pump as we originally planned, we faced both pumps down. This lets the sub sort of puddle hop. We trimmed the sub to slowly sink to the bottom. Then we 'jump' using downward thrust and navigate with forward and reverse thrust.

The sub sits on the floor and glides along it pretty well. We did have issues where the pool was highly slanted to go into the deep end. Another problem was that the longer it was in the water, the more affect the leaking had on the boyancy. As air is displaced by water in the case, the boyancy changes and it is harder to get the sub to lift off the bottom and move forward. This could be solved by permanantly sealing the case so that water can not get in.
Now that the control software is finalized, this is a possability. At first, the case performed as advertised. We put it in an aquarium with a rock on it for over an hour and it had no leaking.
We then drilled and fitted the hose barbs in order to bring in wiring. These barbs were sealed up with silocone and then plugged. (look in the archive for photos of the process). The water test was repeated and after a few leaks were discovered and mended, again passed for over an hour with no water intrusion.
We believe that constant opening and closing of the case during the design and build process eventually weakened the seal and liner. We believe the gasket as designed is only good for a finite number of uses before it breaks down and fails. That being said, even after 20 mins in the water, there was only about half a cup of water in the case. So the case still performed mostly as advertised, even after our warrenty destruction. Half a cup of water might be fine for a digital camera that is turned off and a wallet, and keychain and other items someone might take with them on a boat trip. It is not ok for an exposed electronics board that is powered up and controlling 6 circuits capable of 5 amps each.
Luckilly the positioning of the board ment that it only got a little wet, and only biased some transistors. In effect, turned on a motor or two when we didnt want them on. This would become apparent when an 'all stop' command was issued and the sub would make a slow spiral.
No comments:
Post a Comment